No modelo de Lotka-Volterra temos as seguintes considerações:
- Na ausência de predadores, a população de presas aumenta a uma taxa proporcional à população atual;
- Na ausência de presas, os predadores irão à extinção;
- O número de encontro entre presas e predadores é proporcional a produto das duas populações.
- Estes encontros beneficiam os predadores em detrimento das presas.
Dessa forma, as equações são:


Onde:
 taxa de crescimento de presas sem predadores;
taxa de crescimento de presas sem predadores; taxa de decréscimo da população de presas devido a predação;
taxa de decréscimo da população de presas devido a predação; taxa de mortalidade da população de predadores sem presas;
taxa de mortalidade da população de predadores sem presas; : taxa de crescimento de predadores devido a predação.
: taxa de crescimento de predadores devido a predação.
Separação de variáveis
Utilizando a separação de variáveis, temos:

Logo:



Integrando ambos os lados:


Onde  é uma constante de integração. Para plotarmos um gráfico, considerando apenas
é uma constante de integração. Para plotarmos um gráfico, considerando apenas  Temos então:
Temos então:

Um ponto de equilíbrio fora da origem é obtido quando:


Então neste caso, o sistema oscila em torno de  e a constante é definida pelas condições iniciais
e a constante é definida pelas condições iniciais  . Para a condição em que
. Para a condição em que  , então:
, então:


Então para este conjunto de parâmetros e condições iniciais:

Neste caso o sistema vai permanecer no ponto de equilíbrio. Para outras condições iniciais, o sistema vai oscilar em torno do ponto de equilíbrio. Obviamente além do ponto , temos um ponto de equilíbrio em  . Vamos analisar a dinâmica na vizinhança dos pontos através de um processo simples de linearização.
. Vamos analisar a dinâmica na vizinhança dos pontos através de um processo simples de linearização.
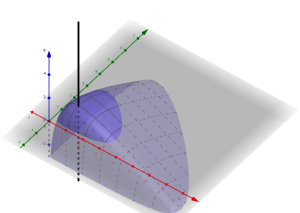

com as condições

e condição inicial arbitrária, plotado no
GeoGebra.
Linearização em torno do ponto de equilíbrio
Primeiro podemos perceber que o sistema é quase-linear em torno de , verificando que satisfaz:
![{\displaystyle \lim _{\left(x,y\right)\rightarrow \left(0,0\right)}\left[{\frac {\text{parte não linear}}{\text{parte linear}}}\right]=0}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b4ca6abbc194299f719405b0872379c5d523d4f6)
Então lembrando as equações:
![{\textstyle {\frac {dx}{dt}}=\left[xa\right]-\left(\alpha xy\right)=\left[{\text{linear}}\right]-\left({\text{não linear}}\right)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c5e0909c2fe98e48408a9b0aa88ea24a23df81c8)
![{\textstyle {\frac {dy}{dt}}=-\left[yc\right]+\left(\gamma yx\right)=-\left[{\text{linear}}\right]+\left({\text{não linear}}\right)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7ca798c9e0fc6c58ca4c9578f25d4e7b5843ba02)
Logo:


Desprezando então os termos não lineares podemos escrever o seguinte sistema linearizado em torno da origem:

Calculando os autovalores da matriz, obtemos então:


os seguintes autovalores  . Como um dos valores tem parte real positiva, então é um ponto instável, especificamente devido aos sinais opostos é um ponto de sela. Como é instável significa que se a condição inicial for próxima de , a evolução do sistema vai se afastar do ponto de equilíbrio. Essa aproximação também indica que próximo do ponto de equilíbrio, a dinâmica pode ser descrita tanto pelo conjunto de equações não lineares, como pelo sistema linear.
. Como um dos valores tem parte real positiva, então é um ponto instável, especificamente devido aos sinais opostos é um ponto de sela. Como é instável significa que se a condição inicial for próxima de , a evolução do sistema vai se afastar do ponto de equilíbrio. Essa aproximação também indica que próximo do ponto de equilíbrio, a dinâmica pode ser descrita tanto pelo conjunto de equações não lineares, como pelo sistema linear.
Agora o segundo ponto de equilíbrio, de maneira geral é  . Primeiro reescrevemos o sistema em torno do ponto de equilíbrio, isto é, fazemos um deslocamento
. Primeiro reescrevemos o sistema em torno do ponto de equilíbrio, isto é, fazemos um deslocamento  e
e  . Então temos
. Então temos  e
e  e substituindo, para
e substituindo, para  :
:



E para

:



Podemos analisar o comportamento em torno do ponto de equilíbrio:


Desprezando os termos não lineares então:

Então os autovalores correspondentes:


Como temos raízes puramente imaginárias e  , temos um centro, ponto de estabilidade. Isto é, se a condição inicial for próxima de o sistema evoluirá de forma que o estado do sistema permanecerá próximo do ponto de equilíbrio.
, temos um centro, ponto de estabilidade. Isto é, se a condição inicial for próxima de o sistema evoluirá de forma que o estado do sistema permanecerá próximo do ponto de equilíbrio.

Classificação dos pontos de estabilidade de acordo com os autovalores
[1].
Segundo método de Lyapunov
Para avaliar o ponto  , podemos usar de maneira análoga ao exemplo do segundo critério de Lyapunov:
, podemos usar de maneira análoga ao exemplo do segundo critério de Lyapunov:

Como já discutimos  e a região
e a região  onde
onde  para
para  , sendo
, sendo  um ponto de acumulação em
um ponto de acumulação em  [2]. Então:
[2]. Então:
![{\displaystyle {\begin{aligned}{\dot {V}}\left({\boldsymbol {x}}\right)&=\left[\nabla V\right]\cdot \left[{\boldsymbol {f}}\left({\boldsymbol {x}}\right)\right]\\&=\left({\frac {2x}{\alpha }},-{\frac {2y}{\gamma }}\right)\left({\dot {x}},{\dot {y}}\right)\\&=2x^{2}{\frac {a}{\alpha }}-2x^{2}y+2y^{2}{\frac {c}{\gamma }}-2y^{2}x\\&=2x^{2}\left({\frac {a}{\alpha }}-y\right)+2y^{2}\left({\frac {c}{\gamma }}-x\right)\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/115a8ceabc292aa4684eec7edb8fa260f2d9cc9f)
Lembrando do nosso segundo ponto de equilíbrio

:

Então se estamos próximos suficiente do ponto de equilíbrio em análise , temos então uma instabilidade local pois  é positivo definido em , uma vez que
é positivo definido em , uma vez que  ,
,  . Olhando o segundo ponto de equilíbrio, , podemos manipular as equações da seguinte forma:
. Olhando o segundo ponto de equilíbrio, , podemos manipular as equações da seguinte forma:


Definindo então a seguinte função de Lyapunov:
![{\displaystyle V\left(x,y\right)=x-x_{2}\left[1+\ln \left({\frac {x}{x_{2}}}\right)\right]+{\frac {\alpha }{\gamma }}\left(y-y_{2}\left[1+\ln \left({\frac {y}{y_{2}}}\right)\right]\right)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/015902f8d6745ecc887407611362e676b24ad0ec)
Analisando no ponto de e equilíbrio, temos:
![{\displaystyle {\begin{aligned}V\left(x_{2},y_{2}\right)&=x_{2}-x_{2}\left[1+\ln \left({\frac {x_{2}}{x_{2}}}\right)\right]+{\frac {\alpha }{\gamma }}\left(y_{2}-y_{2}\left[1+\ln \left({\frac {y_{2}}{y_{2}}}\right)\right]\right)\\&=x_{2}-x_{2}+{\frac {\alpha }{\gamma }}\left(y_{2}-y_{2}\right)\\&=0\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/fd0878341a5c33584ac2574f7c09fb46ec889fdc)
Agora precisamos que para  tenhamos
tenhamos  , na região próxima ao ponto de equilíbrio. Separando em dois termos:
, na região próxima ao ponto de equilíbrio. Separando em dois termos:
![{\displaystyle {\begin{aligned}V\left(x,y\right)&=\left[x-x_{2}\left(1+\ln \left({\frac {x}{x_{2}}}\right)\right)\right]+{\frac {\alpha }{\gamma }}\left[y-y_{2}\left(1+\ln \left({\frac {y}{y_{2}}}\right)\right)\right]\\&=V\left(x\right)+{\frac {\alpha }{\gamma }}V\left(y\right)\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/223f3eeff7028162c5517b1c5e13e21bef0bbaba)
De forma geral temos  , e precisamos que
, e precisamos que  quando
quando  . Além de ser facilmente visto via gráfico para todos os valores aceitáveis
. Além de ser facilmente visto via gráfico para todos os valores aceitáveis ![{\textstyle z,z_{2}\in \left[0,1\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7c0364a5cd0d5b9075083435d425526099f185fa) , também podemos analisar a seguinte desigualdade:
, também podemos analisar a seguinte desigualdade:

Podemos ver quer a desigualdade desigualdade é válida exceto se

. Mas como fizemos a seguinte substituição

então

, e de fato que queremos que seja positiva definida fora do ponto de equilíbrio. Uma vez que sabemos que

é positivo definido, calculamos então:
![{\displaystyle {\begin{aligned}{\dot {V}}\left({\boldsymbol {x}}\right)&=\left[\nabla V\right]\cdot \left[{\boldsymbol {f}}\left({\boldsymbol {x}}\right)\right]\\&=\left[{\frac {\partial V\left(x\right)}{\partial x}},{\frac {\alpha }{\gamma }}{\frac {\partial V\left(y\right)}{\partial y}}\right]\cdot \left[x\alpha \left(y_{2}-y\right),y\gamma \left(-x_{2}+x\right)\right]\\&=\left[1-{\frac {x_{2}}{x}},{\frac {\alpha }{\gamma }}\left(1-{\frac {y_{2}}{y}}\right)\right]\cdot \left[x\alpha \left(y_{2}-y\right),y\gamma \left(-x_{2}+x\right)\right]\\&=\left({\frac {x-x_{2}}{x}}\right)\left(x\alpha \left(y_{2}-y\right)\right)+{\frac {\alpha }{\gamma }}\left({\frac {y-y_{2}}{y}}\right)\left(y\gamma \left(-x_{2}+x\right)\right)\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/dd0202dbb5817e09f79910d109f57dc7ae700b95)
Então:

Temos então a condição de estabilidade

concordando como que já havíamos obtidos anteriormente.
Solução numérica
Um exemplo resolvido numericamente pode ser visto em Modelo de Lotka-Volterra amortecido, onde foi aproveitado os códigos desenvolvidos para este mesmo.
Principais materiais utilizados
- A survey of constructing Lyapunov functions for mathematical models in population biology (Sze-Bi, Revista Taiwanesa de Matemática )
- Estabilidade de pontos de equilíbrio e existência de soluções periódicas em alguns modelos bidimensionais (Salvador Tavares de Oliveira, UNESP)
- Modelagem Matemática e estabilidade de sistemas predador-presa (Paulo Laerte Natti e outros, UEL)
- Modelo de Lotka-Volterra: a dinâmica predador-presa (Rafael Biasi Pata e Elisa Regina Cara, UNIPAMPA)
Citações

