Grupo : Gustavo H. Guesser, Joshua L. Kipper, Marcos Pasa.
Pêndulo Simples
Equação de movimento
Primeiramente vamos inserir ruído em um pêndulo simples, que é constituído de uma barra de comprimento  , sem massa e rígida que contém uma massa
, sem massa e rígida que contém uma massa  pontual em sua ponta, conforme ilustrado na figura a seguir.
pontual em sua ponta, conforme ilustrado na figura a seguir.
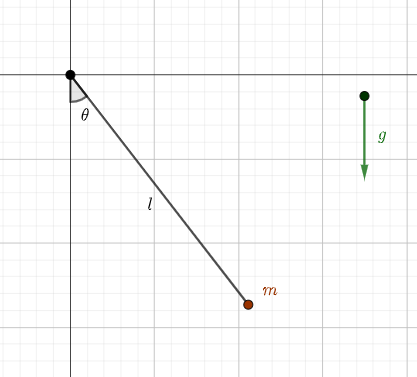
Esquema de um pêndulo simples em um campo gravitacional constante.
Considerando que o pêndulo está sob o efeito da gravidade e se encontra submerso em um fluido viscoso (como o ar), tal que a força de resistência que atua na massa é  , a equação de movimento é dada por:
, a equação de movimento é dada por:

Vamos supor que existe uma força ruidosa atuando em , tal que sua componente tangencial ( ) pode ser modelada por um ruído branco gaussiano
) pode ser modelada por um ruído branco gaussiano  da seguinte forma
da seguinte forma

em que  é a intensidade do ruído. é caracterizado pelas seguintes propriedades:
é a intensidade do ruído. é caracterizado pelas seguintes propriedades:

Adicionando essa nova força nas equações de movimento, ficamos com

A partir de agora, por questão de simplicidade, vamos supor que  , então
, então

Método de integração
Vamos montar um método para integrar o sistema no tempo. Primeiramente vamos dividir a equação em duas equações diferencias de primeira ordem, introduzindo a variável  , então ficamos com o seguinte sistema
, então ficamos com o seguinte sistema

que pode ser escrito na forma diferencial

mas  é o incremento do processo de Wiener (
é o incremento do processo de Wiener ( ), então
), então

Discretizando o tempo e lembrando que a densidade de probabilidade de transição de  para
para  tem desvio padrão igual a
tem desvio padrão igual a 

em que  é uma amostra de uma distribuição gaussiana com média 0 e variância 1, e o método de Euler foi utilizado para a parte determinística da equação.
é uma amostra de uma distribuição gaussiana com média 0 e variância 1, e o método de Euler foi utilizado para a parte determinística da equação.
Nas próximas seções será analisado a energia do sistema, e como o método de Euler não é muito bom para preservar a energia de sistemas conservativos, será utilizado o método preditor corretor (com adição do método de Heun para  ) para a parte determinística da equação, que consiste nos seguintes passos:
) para a parte determinística da equação, que consiste nos seguintes passos:
- Calcular um theta intermediário:

- Com
 calcular um theta médio e utilizá-lo para obter um omega intermediário:
calcular um theta médio e utilizá-lo para obter um omega intermediário:

- Em que
 é a expressão do método de Euler visto logo acima.
é a expressão do método de Euler visto logo acima.
- Recalcular theta utilizando um omega intermediário

- Recalcular omega com um theta intermediário atualizado

- OBS: No cálculo de
 e
e  foi utilizado o mesmo
foi utilizado o mesmo  .
.
Energia (Sem amortecimento)
Logo após terminar a implementação do método numérico, rapidamente notamos que a adição do ruído gera um aumento na energia mecânica do pêndulo ( ), vamos explorar esse fenômeno, sempre utilizando
), vamos explorar esse fenômeno, sempre utilizando  . Para ilustrar esse efeito, segue uma animação do pêndulo partindo do repouso na configuração de equilíbrio estável (
. Para ilustrar esse efeito, segue uma animação do pêndulo partindo do repouso na configuração de equilíbrio estável ( ) com
) com 
Pêndulo partindo do repouso com ruído.
Para realizar uma exploração quantitativa, o seguinte procedimento foi feito para vários valores de :
- Utilizando
 , integrar o sistema até
, integrar o sistema até  , calculando e armazenando a energia em cada passo temporal. Repetir essa integração 700 vezes para fazer médias temporais. Como exemplo, segue os dados obtidos da energia em função do tempo (com a média temporal feita) para um determinado utilizado
, calculando e armazenando a energia em cada passo temporal. Repetir essa integração 700 vezes para fazer médias temporais. Como exemplo, segue os dados obtidos da energia em função do tempo (com a média temporal feita) para um determinado utilizado
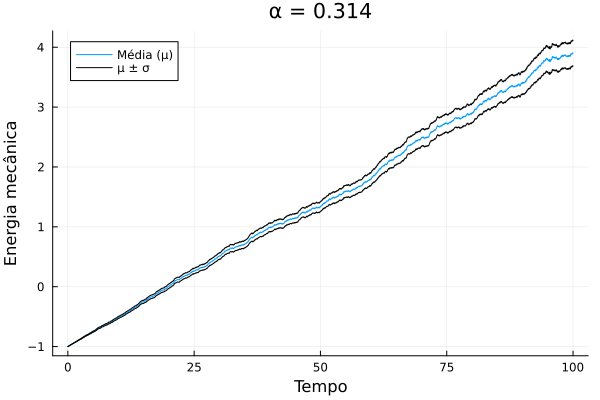
Energia média em função tempo.
- O gráfico nos indica que o ruído gera uma potência média sobre o pêndulo.
- Realizar um ajuste linear nos dados
 para obter o coeficiente angular, que corresponde a potência média gerada pelo ruído (
para obter o coeficiente angular, que corresponde a potência média gerada pelo ruído ( ).
).
Com as simulações executadas, foi realizado o gráfico  . Notamos que os dados se alinham em linha reta com os eixos em escala logarítmica, ou seja, os mesmos seguem uma lei de potência
. Notamos que os dados se alinham em linha reta com os eixos em escala logarítmica, ou seja, os mesmos seguem uma lei de potência  , então foi realizado outro ajuste linear para encontra o expoente
, então foi realizado outro ajuste linear para encontra o expoente  , a figura a seguir ilustra os dados e os resultados do ajuste:
, a figura a seguir ilustra os dados e os resultados do ajuste:
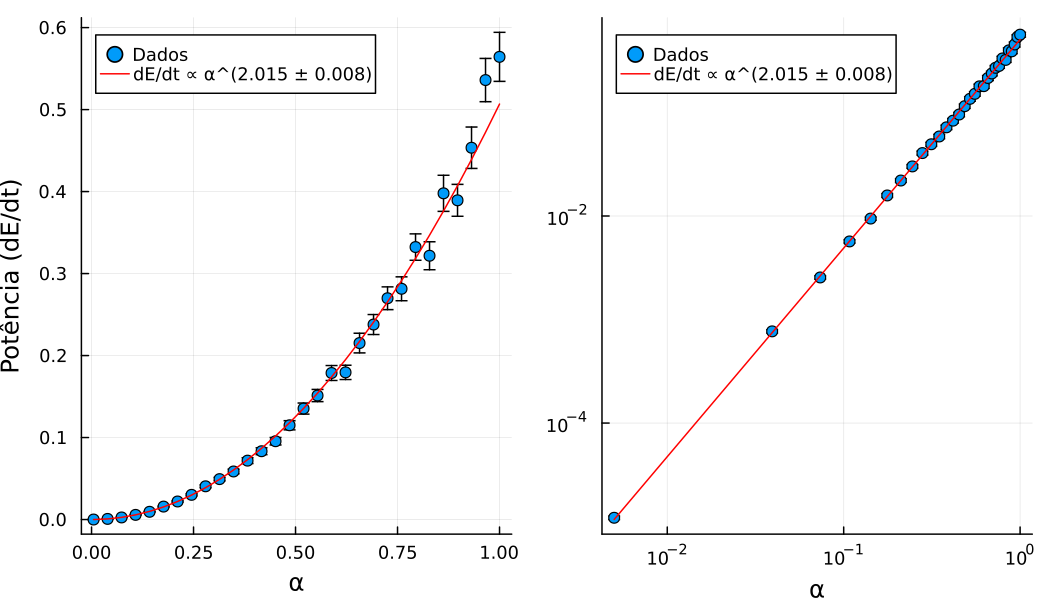
Potência em função do ruído (
). O painel da esquerda possui eixos em escala linear e o da direita em escala logarítmica.
Portanto, aumenta, aproximadamente, de forma quadrática com . Por fim, gostaríamos de mostrar que mesmo para muito pequeno, ainda existe energia sendo injetada no sistema com taxa constante, e isso não é um artefato da simulação. Para tal, foram realizadas 700 simulações com  e os resultados foram comparados com
e os resultados foram comparados com 
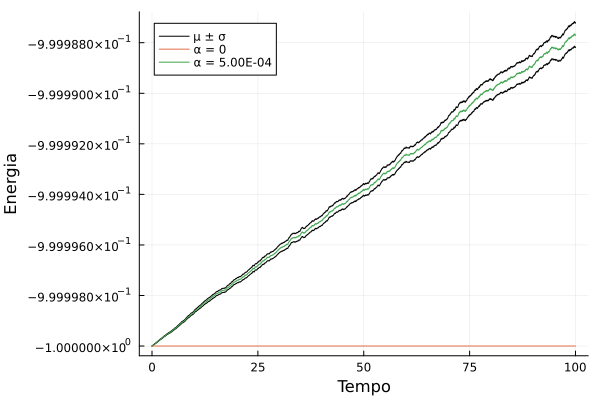
Energia média para
muito pequeno comparado com
nulo.
Energia (Com amortecimento)
Até o momento, o amortecimento foi negligenciado. Vamos, então, introduzi-lo e rodar várias simulações (700, neste caso) e observar como a média temporal da energia evolui ao longo do tempo, assim como foi feita na seção anterior. Utilizando  e
e  foi obtido o seguinte resultado
foi obtido o seguinte resultado
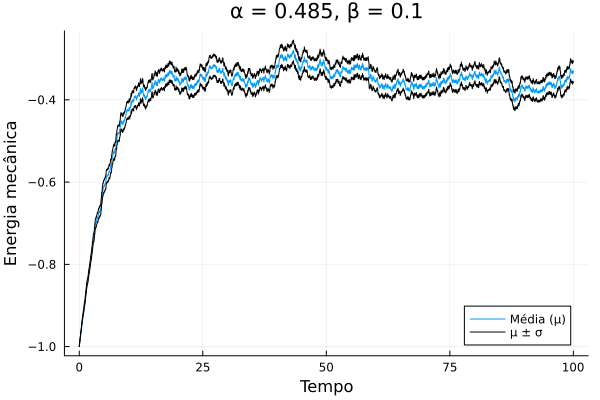
Energia mecânica média em função do tempo com amortecimento.
claramente o comportamento neste caso é diferente do observado sem amortecimento, agora a anergia aumenta até um certo valor e permanece nele. Para explorar este novo fenômeno, os seguintes passos foram feitos para cada valor de  :
:
- Para diversos valores de , executar 700 simulações até a energia estabilizar, salvando a média da energia entre as simulações.
- Para cada conjunto de dados gerados por um determinado , selecionar um intervalo de tempo onde a energia está estabilizada e calcular a sua média (
 ).
).
Produzindo o gráfico de  obtemos
obtemos
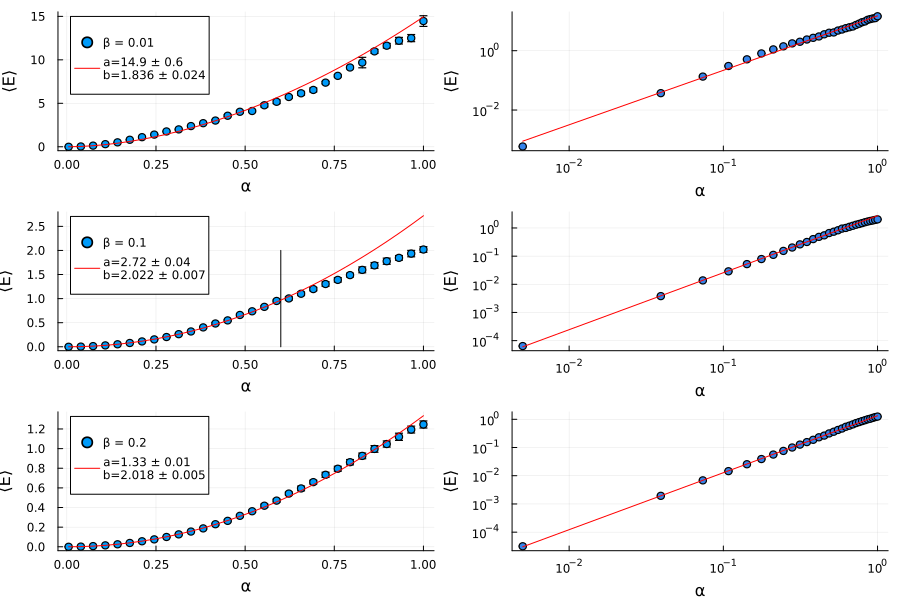
Energia estabilizada média em função de
para diferentes valores de amortecimento. Os painéis da esquerda possui eixos em escala linear e os da direita em escala logarítmica.
as linhas vermelhas são os melhores ajustas de leis de potência na forma  . Para os dados utilizados no ajuste foram apenas até
. Para os dados utilizados no ajuste foram apenas até  (indicado pela reta preta vertical no gráfico), pois após esse limite, a lei de potência deixa de ser um ótimo ajuste. É chamativo o fato de todos os coeficientes, independente de
(indicado pela reta preta vertical no gráfico), pois após esse limite, a lei de potência deixa de ser um ótimo ajuste. É chamativo o fato de todos os coeficientes, independente de  , serem aproximadamente 2.
, serem aproximadamente 2.
Pêndulo invertido
O próximo pêndulo a ser considerado é um pêndulo invertido, que possui um potencial harmônico em seu ângulo, ou seja, um dos termos de sua energia potential é  , sendo que agora é zero quando a haste está apontando para cima, conforme ilustrado na figura a seguir
, sendo que agora é zero quando a haste está apontando para cima, conforme ilustrado na figura a seguir

Esquema do pêndulo invertido com movimento vertical livre na base.
Ainda, a base do pêndulo é livre para movimentar-se na direção vertical, é justamente nesse local onde será adicionado uma força ruidosa. A equação de movimento neste caso é

O primeiro termo vem da resistência do ar, o segundo se origina da gravidade e do deslocamento de  e o último provém da "mola" em . Vamos supor que existe um vínculo mantendo a base fixa, mas o local onde o pêndulo é fixado pode se movimentar de forma aleatória na direção vertical, supondo que tal movimento pode ser modelado por ruído branco gaussiano, segue que
e o último provém da "mola" em . Vamos supor que existe um vínculo mantendo a base fixa, mas o local onde o pêndulo é fixado pode se movimentar de forma aleatória na direção vertical, supondo que tal movimento pode ser modelado por ruído branco gaussiano, segue que  . Introduzindo a variável , ficamos com os seguintes sistemas de equações na forma diferencial
. Introduzindo a variável , ficamos com os seguintes sistemas de equações na forma diferencial

Note que agora o ruído é multiplicativo, em contraste com o ruído aditivo dos pêndulos anteriores, para lidar com esta complicação, no momento da integração vamos utilizar um médio no argumento do seno que multiplica 

Esse tipo de pêndulo é de grande interesse em algumas áreas, como na engenharia estrutural, pois uma coluna comprimida pode ser modelada como um pêndulo invertido com uma mola na base, o ruído da base pode representar um terremoto.
Uma questão interessante neste modelo é sobre a estabilidade da configuração  quando é adicionado ruído e amortecimento. Se
quando é adicionado ruído e amortecimento. Se  é grande o suficiente, sem ruído, o equilíbrio é estável, mas é possível sair dessa configuração adicionando ruído, cujo valor limite vai depender do amortecimento. Podemos demostrar isso integrando o sistema, partindo da condição inicial
é grande o suficiente, sem ruído, o equilíbrio é estável, mas é possível sair dessa configuração adicionando ruído, cujo valor limite vai depender do amortecimento. Podemos demostrar isso integrando o sistema, partindo da condição inicial  , com valores de muito próximos:
, com valores de muito próximos:
os seguintes valores foram utilzados
No gráfico da esquerda, o ângulo oscilou um pouco e permaneceu em 0, já no outro, eventualmente, o ângulo explodiu. Abaixo segue uma animação dessa situação, mas com  para o pêndulo sair do equilíbrio mais rápido
para o pêndulo sair do equilíbrio mais rápido

Pêndulo invertido partindo do equilíbrio com ruído.
Pêndulo Duplo Estocástico
O pêndulo duplo estocástico é um sistema dinâmico que combina a complexidade intínseca do pêndulo duplo com a introdução de elementos de aleatoriedade ou incerteza, tornando o comportamento do sistema ainda mais imprevisível e caótico. O pêndulo duplo em si é um exemplo clássico de um sistema caótico, onde pequenas variações nas condições iniciais podem resultar em trajetórias drasticamente diferentes. Quando um termo estocástico é adicionado, por exemplo, na forma de uma força externa aleatória ou de flutuações nos parâmetros do sistema, a análise e a previsão do movimento se tornam desafiadoras.
Pêndulo Duplo não estocástico.
Equação de movimento
O pêndulo duplo consiste em dois pêndulos acoplados, onde o segundo pêndulo está suspenso na extremidade do primeiro. As equações de movimento para o pêndulo duplo sem termos estocásticos podem ser derivadas utilizando as equações de Lagrange, considerando as coordenadas angulares  e
e  como as variáveis generalizadas e são dadas por:
como as variáveis generalizadas e são dadas por:


mantendo  ,
,  , ,
, ,  , fixos, defina :
, fixos, defina :


assim as equações dinâmicas ficam escritas de maneira mais compacta:


suponha que haja um força externa ruidosa,  , onde
, onde  além de dar a intensidade do ruído branco, terá consigo todas as constantes agrupadas. Assim as equações de movimento se tornam:
além de dar a intensidade do ruído branco, terá consigo todas as constantes agrupadas. Assim as equações de movimento se tornam:


Método de integração
Para a integração numérica desse sistema utilizaremos o método Runge-Kutta 4. Seja  o sistema de equações se torna:
o sistema de equações se torna:




na forma diferencial:




onde  é o incremento do processo de Wiener. Discretizando as equações diferencias e aplicando o método RK4, obtemos:
é o incremento do processo de Wiener. Discretizando as equações diferencias e aplicando o método RK4, obtemos:

para  e .
e .
Retrato de fase
Energia
Vamos analisar a como se comporta a energia mecânica do pêndulo duplo com diferentes sistemas com ruído aditivo. Nas simulações sempre utilizamos , , como unitários.
Caso 1 : Ruído em θ₁
Caso 2 : Ruído em θ₂
Caso 3 : Ruídos Iguais em θ₁ e θ₂
Caso 4 : Ruídos Diferentes em θ₁ e θ₂











