Grupo: Lucas Dória, Caetano Pires e Ânderson Rosa.
O objetivo deste trabalho é analisar três métodos diferentes de integração numérica para resolução de equações diferenciais parciais (EDP's). A equação aqui abordada é a equação da onda, a qual consiste em uma EDP hiperbólica de segunda ordem. Uma pequena noção dos métodos numéricos é dada, após a explicação do problema físico abordado. Os dados encontrados são comentados e comparados com os resultados esperados. Simulações também foram feitas para melhor visualização dos fenômenos. Por último, foi feita uma análise de erros e estabilidade para cada um dos métodos, assim como algumas conclusões foram inferidas.
Introdução
Equações diferenciais parciais hiperbólicas geralmente podem ser formuladas a partir de teoremas de conservação. Um exemplo é a equação do tipo:

onde  é o vetor de densidades da quantidade conservada, i.e.,
é o vetor de densidades da quantidade conservada, i.e., 
 é o fluxo de densidade e
é o fluxo de densidade e  é um termo genérico representando fontes e/ou sumidouros.
é um termo genérico representando fontes e/ou sumidouros.
Uma classe especial de equações hiperbólicas são as chamadas equações de adveção, na qual a derivada temporal da quantidade conservada  é proporcional à sua derivada espacial. Nesses casos,
é proporcional à sua derivada espacial. Nesses casos,  é diagonal e dada por:
é diagonal e dada por:

onde  é a matriz identidade.
é a matriz identidade.
Considerando apenas uma dimensão e com  , temos a equação de adveção:
, temos a equação de adveção:

onde  é a velocidade de propagação do pulso gerado. A equação admite uma solução analítica da forma
é a velocidade de propagação do pulso gerado. A equação admite uma solução analítica da forma  representando um pulso se movendo na direção positiva de
representando um pulso se movendo na direção positiva de 
A equação da onda em uma dimensão é uma EDP hiperbólica de segunda ordem dada por

onde  é o deslocamento transversal à direção de propagação de uma posição
é o deslocamento transversal à direção de propagação de uma posição  no instante
no instante  e admite duas soluções, representadas por pulsos, na forma
e admite duas soluções, representadas por pulsos, na forma  e
e 
Assumindo que não depende da posição na equação da onda, nos restringimos a problemas lineares. Além disso, se escrevermos

então a equação da onda pode ser escrita como um sistema de três equações diferenciais de primeira ordem:

Em notação vetorial, o sistema acima pode ser reescrito na forma conservativa como: 
onde 
Condição CFL
Uma condição necessária mas nem sempre suficiente para a convergência de equações diferenciais parciais resolvidas a partir de métodos de diferença, conhecida como condição CFL [1], é formulada a partir do termo de “domínio de dependência”.
Considerando, por exemplo, a equação da advecção [1] em uma aproximação a partir de métodos de diferença em sua forma explícita

diz-se que o valor de  depende dos valores anteriores de
depende dos valores anteriores de  e
e  , e esses dois pontos dependem, novamente, de outros dois pontos em tempos anteriores. Todos esses pontos dependentes formam o domínio de dependência do valor , representado abaixo (botar figura do domínio de dependência).
, e esses dois pontos dependem, novamente, de outros dois pontos em tempos anteriores. Todos esses pontos dependentes formam o domínio de dependência do valor , representado abaixo (botar figura do domínio de dependência).
A condição CFL enuncia que a condição mínima para que haja estabilidade em métodos de diferenças o domínio de dependência da equação diferencia parcial, dado por sua equação característica, deve estar situado dentro do domínio de dependência do esquema numérico.
A partir dessa condição, define-se o número CFL como

onde  é um passo na malha temporal e
é um passo na malha temporal e  é um passo na malha espacial. Para casos unidimensionais, como o que será tratado aqui, a condição CFL é satisfeita se r
é um passo na malha espacial. Para casos unidimensionais, como o que será tratado aqui, a condição CFL é satisfeita se r

Um uso da condição CFL é determinar o tamanho do passo temporal, sabendo-se e :

onde o fator  .
.
O número CFL pode ser entendido como um fluxo numérico advectivo adimensionalisado pelas malhas espacial e temporal do problema. De um ponto de vista matemático, ele garante que o domínio numérico de dependência é sempre maior que o domínio físico. De um ponto de vista físico, é garantido que a velocidade de propagação de qualquer perturbação, como uma onda, seja menor ou ao menos igual que a velocidade de propagação numérica, fazendo com que a distância propagada pela perturbação não seja maior do que a divisão da malha espacial:

O Problema Físico
O Modelo de Corda Ideal
Para uma primeira abordagem da equação da onda, consideramos uma corda com suas extremidades fixas. Podemos dividir o comprimento  dessa corda em
dessa corda em  intervalos de comprimentos iguais, dessa forma
intervalos de comprimentos iguais, dessa forma  . Cada intervalo é discretizado, representado por
. Cada intervalo é discretizado, representado por  ,
,  . Também podemos dividir o tempo em intervalos iguais e denotá-los como
. Também podemos dividir o tempo em intervalos iguais e denotá-los como  ,
,  . Abaixo temos uma esquematização das informações que precisamos para cada ponto da corda:
. Abaixo temos uma esquematização das informações que precisamos para cada ponto da corda:
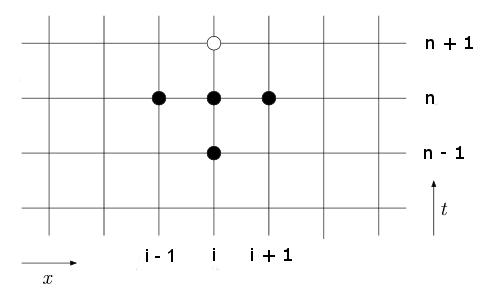
Tendo feita a discretização das variáveis, podemos aproximar a equação da onda por diferenciação finita, utilizando derivadas centradas da seguinte forma:


onde representa o valor discretizado de  .
.
Assim, chegamos em uma equação discretizada:
 .
.
Sabendo que essa discretização da equação da onda pode ser verificada como sendo o método Leapfrog (ver seção do método de Leapfrog método de Leapfrog), podemos resolver a equação para para sabermos o deslocamento vertical de uma partição da corda no momento de tempo seguinte, assim obtendo
![{\displaystyle U_{i}^{n+1}=2(1-r^{2})U_{i}^{n}+r^{2}[U_{i+1}^{n}+U_{i-1}^{n}]-U_{i}^{n-1}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6ffc557229be16dc91d5c8d5f1b185c80634fdc6) ,
,
onde 
Um Quadro Mais Realístico - O Modelo de Corda Rígida
Para nos aproximarmos de um modelo mais real, podemos adicionar um termo à equação original da onda que corresponde ao efeito de fricção em uma corda. A equação da onda mais geral com efeito de fricção pode ser escrita como: [2]

onde é a velocidade transversal de propagação do pulso na corda, dada pela relação ![{\displaystyle v={\sqrt[{}]{\frac {T}{\rho }}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6d9f8b0e2989b05536891f8e25fda20ccbb73526) (sendo
(sendo  a tensão na corda e
a tensão na corda e  a densidade linear da mesma),
a densidade linear da mesma),  é um parâmetro adimensional de fricção que representa a rigidez da corda e o comprimento da corda.
é um parâmetro adimensional de fricção que representa a rigidez da corda e o comprimento da corda.
O parâmetro é dado por
Falhou ao verificar gramática (erro de sintaxe): {\displaystyle \epsilon = \kappa² \frac{E S}{T L^2}}
,
onde  é o raio de giro da corda,
é o raio de giro da corda,  é o Módulo de Young e
é o Módulo de Young e  a área da secção da corda.
a área da secção da corda.
Discretizamos a equação da seguinte maneira:

e resolvemos para , obtendo:
![{\displaystyle U_{i}^{n+1}=[2-2r^{2}-6\epsilon r^{2}K^{2}]U_{i}^{n}-U_{i}^{n-1}+r^{2}[1+4\epsilon K^{2}][U_{i+1}^{n}+U_{i-1}^{n}]-\epsilon r^{2}K^{2}[U_{i+2}^{n}+U_{i-2}^{n}].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/211aa432ea15c7e195cc58bbdd0ad03b2536e306)
O fato de essa discretização depender do deslocamento da corda em posições  e
e  implica em precisarmos simular "pontos fantasmas" quando integramos os extremos das cordas. Para fazermos isso, podemos ou utilizar a aproximação
implica em precisarmos simular "pontos fantasmas" quando integramos os extremos das cordas. Para fazermos isso, podemos ou utilizar a aproximação  ou podemos considerar esses "pontos fantasmas" como pontos presos e, portanto, sempre iguais a zero.
ou podemos considerar esses "pontos fantasmas" como pontos presos e, portanto, sempre iguais a zero.
Os Métodos Utilizados
Foi realizada uma abordagem ao problema da corda real a partir de três métodos diferentes de integração numérica.
O método mais básico é chamado de FTCS (Forward-Time-Centered-Space) e consiste em duas expansões de Taylor ao redor do ponto  :
:


Subtraindo as duas expressões, encontramos a expressão
 ,
,
A qual podemos substituir na equação da onda, juntamente com a discretização da derivada parcial temporal. Temos então que, para um sistema linear de equações hiperbólicas:
![{\displaystyle {\textbf {U}}_{i}^{n+1}={\textbf {U}}_{i}^{n}-{\frac {\Delta t}{2\Delta x}}[{\textbf {F}}_{i+1}^{n}-{\textbf {F}}_{i-1}^{n}]+{\mathcal {O}}(\Delta t^{2},\Delta x^{2}\Delta t)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/51ac12307e68a12c8ab66c9312f54684d89846d5)
Visto que essa última notação é mais genérica, ela será utilizada para a explicação dos métodos posteriores.
O Método de Lax-Friedrichs
O método de Lax-Friedrichs consiste em substituir o termo  com sua respectiva média espacial, i.e.,
com sua respectiva média espacial, i.e.,  . Logo, temos a seguinte equação de recorrência:
. Logo, temos a seguinte equação de recorrência:
![{\displaystyle {\textbf {U}}_{i}^{n+1}={\frac {1}{2}}({\textbf {U}}_{i+1}^{n}+{\textbf {U}}_{i-1}^{n})-{\frac {\Delta t}{2\Delta x}}[{\textbf {F}}_{i+1}^{n}-{\textbf {F}}_{i-1}^{n}]+{\mathcal {O}}(\Delta x^{2})}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4cadf13cfb2bac2263a9998aeaaae5652bc93890)
O Método de Leapfrog
Tanto o método FTCS quanto o método de Lax-Friedrichs são métodos de primeira ordem para a derivada temporal. Nessas circunstâncias,  deve ser significantemente menor do que , muito abaixo do limite imposto pela condição de Courant.
deve ser significantemente menor do que , muito abaixo do limite imposto pela condição de Courant.
Uma nova expressão para a derivada temporal, com precisão de segunda ordem é dada por

Substituindo a nova expressão acima no método de FTCS discutido anteriormente, encontramos o método de Leapfrog:
![{\displaystyle {\textbf {U}}_{i}^{n+1}={\textbf {U}}_{i}^{n-1}-{\frac {\Delta t}{\Delta x}}[{\textbf {F}}_{i+1}^{n}-{\textbf {F}}_{i-1}^{n}]+{\mathcal {O}}(\Delta x^{2}).}](https://wikimedia.org/api/rest_v1/media/math/render/svg/143a9dffff0e2f8819d6e4986ee0b01d8c244c90)
Como o método de Leapfrog será o mais aplicado na resolução do problema da onda, é interessante um aprofundamento maior do método. Podemos adaptar o método de Leapfrog para o sistema de equações definido para a equação da onda ao fazermos a discretização ao redor de um ponto qualquer  no instante de tempo
no instante de tempo  :
:


Com essas discretizações, podemos utilizar as equações (1) e (2) para resolvermos para  apenas em termos de
apenas em termos de  ,
,  e
e  . Fazendo as substituições dessas duas equações uma na outra (ver passo a passo: Dedução Leapfrog), obtemos:
. Fazendo as substituições dessas duas equações uma na outra (ver passo a passo: Dedução Leapfrog), obtemos:

Dessa equação, chegamos a

Utilizando o mesmo raciocínio, podemos também resolver para  e obter
e obter

Com essas duas equações, podemos fazer uma integração utilizando o método de Euler para obter , ou seja, o deslocamento de um determinado ponto da corda no próximo instante de tempo:

Contudo, podemos fazer uma simples substituição das equações  e
e  nas equações
nas equações  e
e  e, assim, obtemos que a representação de Leapfrog da equação da onda é dada pela discretização de segunda ordem da própria equação da onda, com
e, assim, obtemos que a representação de Leapfrog da equação da onda é dada pela discretização de segunda ordem da própria equação da onda, com  (ver passo a passo da comparação Discretização x Leapfrog. Isso nos dá uma solução de "um passo", onde só precisamos efetuar o cálculo da equação discretizada pelo método da derivação finita, ou seja, para o caso da corda ideal, a equação
(ver passo a passo da comparação Discretização x Leapfrog. Isso nos dá uma solução de "um passo", onde só precisamos efetuar o cálculo da equação discretizada pelo método da derivação finita, ou seja, para o caso da corda ideal, a equação
![{\displaystyle U_{i}^{n+1}=2(1-r^{2})U_{i}^{n}+r^{2}[U_{i+1}^{n}+U_{i-1}^{n}]-U_{i}^{n-1}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4559fc34448f3e3c8207bab9e3da829caa195d2a)
O Método de Lax-Wendroff
O método de Lax-Wendroff é a extensão do método de Lax-Friedrichs de segunda ordem. Calculamos o vetor  a partir de um passo médio de Lax-Friedrichs:
a partir de um passo médio de Lax-Friedrichs:
![{\displaystyle {\textbf {U}}_{i+{\frac {1}{2}}}^{n+{\frac {1}{2}}}={\frac {1}{2}}[{\textbf {U}}_{i+1}^{n}+{\textbf {U}}_{i}^{n}]-{\frac {\Delta t}{2\Delta x}}[{\textbf {F}}_{i+1}^{n}-{\textbf {F}}_{i}^{n}]+{\mathcal {O}}(\Delta x^{2})}](https://wikimedia.org/api/rest_v1/media/math/render/svg/287437c2bdd37c022e3ac7027d372cdb630e49ca) ,
,
![{\displaystyle {\textbf {U}}_{i-{\frac {1}{2}}}^{n+{\frac {1}{2}}}={\frac {1}{2}}[{\textbf {U}}_{i}^{n}+{\textbf {U}}_{i-1}^{n}]-{\frac {\Delta t}{2\Delta x}}[{\textbf {F}}_{i}^{n}-{\textbf {F}}_{i-1}^{n}]+{\mathcal {O}}(\Delta x^{2})}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0a6138d7da4c4f0d90cbbf6a9adb1de606489ee8) ,
,
E encontramos os fluxos  a partir dos valores de
a partir dos valores de 
Logo, com um meio passo de Leapfrog, temos a expressão final do método:
![{\displaystyle {\textbf {U}}_{i}^{n+1}={\textbf {U}}_{i}^{n}-{\frac {\Delta t}{\Delta x}}\left[{\textbf {F}}_{i+{\frac {1}{2}}}^{n+{\frac {1}{2}}}-{\textbf {F}}_{i-{\frac {1}{2}}}^{n+{\frac {1}{2}}}\right]+{\mathcal {O}}(\Delta x^{2})}](https://wikimedia.org/api/rest_v1/media/math/render/svg/42b9230c78f4be4096d5c5f0301ec35296fcdfe4)
Análise e Discussão dos Resultados
Escolhemos para simular quatro diferentes cordas: as cordas C2, C4 e C7, que são cordas dó de um piano [3] e uma corda qualquer baseada nos dados encontrados no livro "Computational Physics" [2]. Os dados das cordas C2, C4 e C7 estão na tabela abaixo, onde iremos definir para cada corda o comprimento, a massa, a tensão aplicada elas, o número de divisões existentes, amostragem de sinal (que é um parâmetro obtido experimentalmente)e o parâmetro de fricção.
|
|
C2
|
C4
|
C7
|
Comprimento ( ) )
|

|

|

|
Massa( ) )
|

|

|

|
Tensão ( ) )
|

|

|
|
| Divisões
|

|

|

|
| Amostragem de sinal
|

|

|

|
| Parâmetro de fricção
|

|

|

|
Desses dados, temos que a densidade linear de massa das cordas é dada por

onde  é a massa e o comprimento da corda,
é a massa e o comprimento da corda,

onde é a tensão na corda,


e
Os dados obtidos a partir de todas essas equações são calculados pelo programa com base dos dados da tabela.
Para a simulação baseada nos dados retirados do livro "Computational Physics"[2], utilizamos uma corda com 2 metros de comprimento, com velocidade de propagação transversal da onda sendo 300 , de 0.01,
, de 0.01,  e parâmetro de fricção de .
e parâmetro de fricção de .
Supondo uma corda inicialmente em repouso, temos que em  a corda irá receber em seu centro o equivalente à batida do martelo de um piano. Supomos que esse estímulo da batida do martelo possuía o formato aproximado de uma Gaussiana com amplitude de
a corda irá receber em seu centro o equivalente à batida do martelo de um piano. Supomos que esse estímulo da batida do martelo possuía o formato aproximado de uma Gaussiana com amplitude de  do comprimento de cada corda.
do comprimento de cada corda.
Então, com o estado inicial da simulação sendo um pulso com o formato de um pacote gaussiano, utilizando condições de contorno fixas, ou seja, mantendo as extremidades da corda paradas e utilizando os dados da tabela para simularmos cada uma das cordas, começamos a simular a propagação de ondas.
Utilizando o método de Leapfrog, foi realizada uma primeira simulação para uma onda ideal em uma corda:
Simulação de uma onda em uma corda ideal com condições de contorno u(0,t) = 0 e u(L,t) = 0. A corda simulada possuía comprimento de 2 metros e a amplitude inicial do pulso gaussiano tinha amplitude de 0.5 metros. Foi utilizado uma velocidade de propagação de 300 m/s,

e
.
Corda C2:
Simulação de uma corda C2 de um piano com os parâmetros da tabela acima.
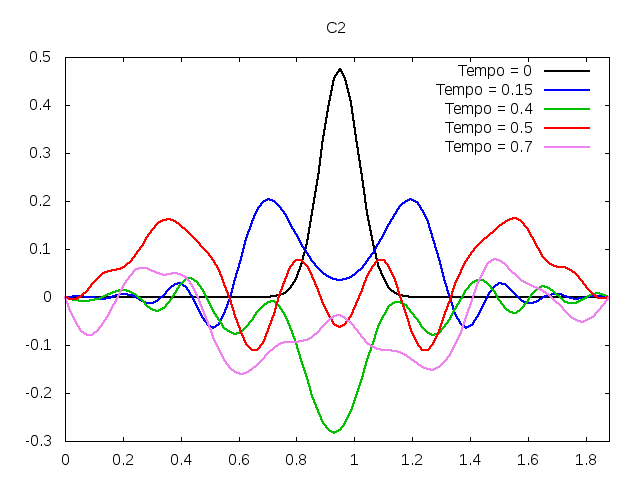
Estado da corda C2 em diferentes instantes de tempo.
Corda C4:
Simulação de uma corda C4 de um piano com os parâmetros da tabela acima.
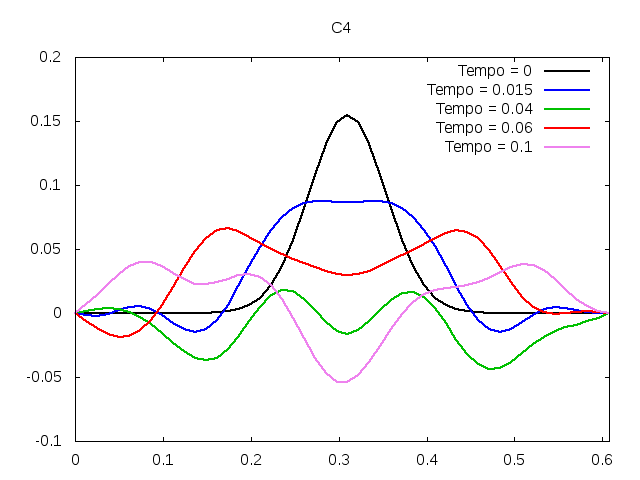
Estado da corda C4 em diferentes instantes de tempo.
Corda C7:
Simulação de uma corda C7 de um piano com os parâmetros da tabela acima.
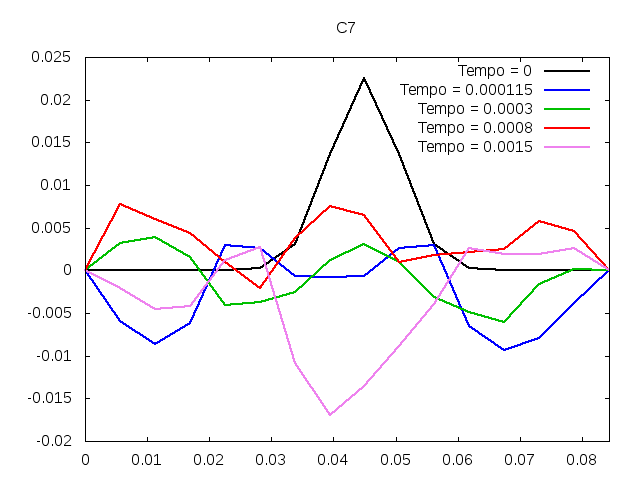
Estado da corda C7 em diferentes instantes de tempo.
Corda com as definições do livro "Computational Physics"[2]:
Simulação da corda exemplificada no livro
Computational Physics [2]. Os parâmetros utilizados estão descritos no texto.
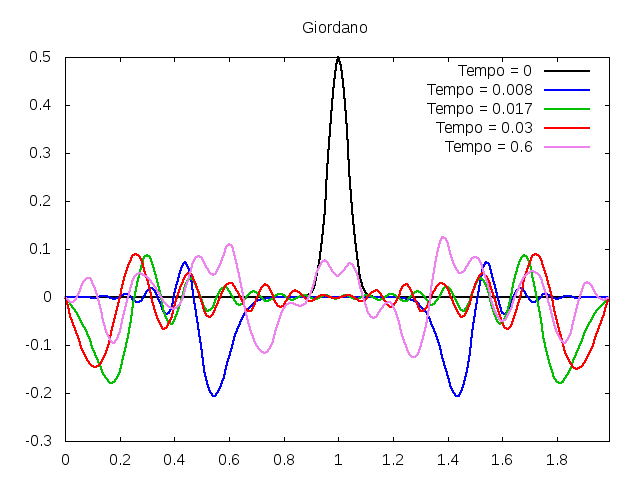
Estado da corda usada como exemplo pelo autor Giordano
[2] em diferentes instantes de tempo.
É possível observar que o tempo necessário para que, devido a fricção, os movimentos na corda diferenciem-se cada vez mais da solução para a corda ideal é menor para um tamanho de corda menor, ou seja, a fricção acaba sendo mais relevante mais rapidamente em cordas mais curtas. Isso significa que deixamos de ter apenas dois pulsos propagando-se em sentidos opostos para termos ou mais pulsos de amplitudes menores, ou a soma de pulsos de diferentes amplitudes.
Scripts para a simulação dos resultados apresentados:
Programa baseado no método de Leapfrog para a simulação de uma corda ideal
Programa baseado no método de Leapfrog para a simulação de uma corda real
Análise de Erro e Estabilidade dos Métodos
Estabilidade do método Leapfrog
Pela estabilidade de Von Neumann, podemos escrever que

Para  , a equação da discretização da onda pode ser reescrita como
, a equação da discretização da onda pode ser reescrita como

Essa escolha com

nos dá a solução exata sem dispersão numérica, como pode ser verificado pela condição CFL. Contudo, é válido somente no caso de uma corda ideal.
É conveniente escrever a condição acima em termos da amostragem de sinal  e a frequência fundamental da corda
e a frequência fundamental da corda  , o que nos leva a
, o que nos leva a

OTeorema de Nyquist-Shannon diz que a frequência superior no espectro deve ser menor do que  para evitar serrilhamento e para garantir uma reconstrução única e contínua. Logo, no caso ideal quando as autofrequências da corda são igualmente espaçadas (
para evitar serrilhamento e para garantir uma reconstrução única e contínua. Logo, no caso ideal quando as autofrequências da corda são igualmente espaçadas ( ), a condição de Nyquist indica que o número máximo de frequências no espectro é . Isso significa que essa condição pode ser usada para selecionar o número apropriado de pontos espaciais para a corda. Entretanto, como é um inteiro, apenas valores discretos da frequência natural podem ser obtidos sem erros de trucamento, ou seja, usando . Como séries discretas não costumam ser utilizadas, precisamos aceitar pequenos erros de truncamento para ajustar
), a condição de Nyquist indica que o número máximo de frequências no espectro é . Isso significa que essa condição pode ser usada para selecionar o número apropriado de pontos espaciais para a corda. Entretanto, como é um inteiro, apenas valores discretos da frequência natural podem ser obtidos sem erros de trucamento, ou seja, usando . Como séries discretas não costumam ser utilizadas, precisamos aceitar pequenos erros de truncamento para ajustar  , ou seja, utilizando
, ou seja, utilizando  . No caso de uma onda com fricção, temos que
. No caso de uma onda com fricção, temos que  é um valor de boa estabilidade.
é um valor de boa estabilidade.
Referências Bibliográficas
- ↑ Luciano Rezzolla, "Numerical Methods for the Solution of Partial Differential Equations". Albert Einstein Institute, Max-Planck-Institute for Gravitational Physics, Potsdam, Germany.
- ↑ 2,0 2,1 2,2 2,3 2,4 2,5 N. J. Giordano, "Computational Physics". Department of Physics, Purdue University. Upper Saddle River, New Jersey. Prentice-Hall, 1997.
- ↑ Antoine Chaign, Anders Askenfelt, "Numerical simulations of piano strings. I. A physical model for a struck string using finite difference methods". Signal Department, Paris, France. Department of Speech Communication and Music Acoustics; Royal Institute of Technology, Stockholm, Sweden.









